
Sisteme incompatibile. Sisteme cu o soluție generală. Soluții private. Sistem de ecuații liniare. Decizie comună
Sistem ecuatii lineare este o uniune de n ecuații liniare, fiecare conținând k variabile. Este scris astfel:
Mulți, când întâlnesc algebră superioară pentru prima dată, cred în mod eronat că numărul de ecuații trebuie să coincidă în mod necesar cu numărul de variabile. În algebra școlară acest lucru se întâmplă de obicei, dar pentru algebra superioară acest lucru nu este în general adevărat.
Soluția unui sistem de ecuații este o succesiune de numere (k 1, k 2, ..., k n), care este soluția fiecărei ecuații a sistemului, adică. când înlocuiți în această ecuație în locul variabilelor x 1, x 2, ..., x n dă egalitatea numerică corectă.
În consecință, rezolvarea unui sistem de ecuații înseamnă găsirea mulțimii tuturor soluțiilor sale sau demonstrarea că această mulțime este goală. Deoarece numărul de ecuații și numărul de necunoscute pot să nu coincidă, sunt posibile trei cazuri:
- Sistemul este inconsecvent, adică setul tuturor soluțiilor este gol. Un caz destul de rar care este ușor de detectat indiferent de metoda folosită pentru a rezolva sistemul.
- Sistemul este consistent și determinat, adică are exact o solutie. Varianta clasică, bine cunoscută încă de la școală.
- Sistemul este consistent și nedefinit, adică are o infinitate de solutii. Aceasta este cea mai grea varianta. Nu este suficient să indicați că „sistemul are un set infinit de soluții” - este necesar să descriem modul în care este structurat acest set.
O variabilă x i se numește permisă dacă este inclusă într-o singură ecuație a sistemului, și cu un coeficient de 1. Cu alte cuvinte, în alte ecuații coeficientul variabilei x i trebuie să fie egal cu zero.
Dacă selectăm o variabilă permisă în fiecare ecuație, obținem un set de variabile permise pentru întregul sistem de ecuații. Sistemul în sine, scris în această formă, va fi numit și rezolvat. În general, unul și același sistem original poate fi redus la altele permise diferite, dar deocamdată nu ne preocupă acest lucru. Iată exemple de sisteme permise:
Ambele sisteme sunt rezolvate în raport cu variabilele x 1 , x 3 şi x 4 . Totuși, cu același succes se poate argumenta că al doilea sistem este rezolvat în raport cu x 1, x 3 și x 5. Este suficient să rescrieți ultima ecuație sub forma x 5 = x 4.
Acum să luăm în considerare un caz mai general. Să avem k variabile în total, dintre care r sunt permise. Atunci sunt posibile două cazuri:
- Numărul de variabile permise r este egal cu numărul total de variabile k: r = k. Obținem un sistem de k ecuații în care r = k variabile permise. Un astfel de sistem este comun și definit, pentru că x 1 = b 1, x 2 = b 2, ..., x k = b k;
- Numărul de variabile permise r este mai mic decât numărul total de variabile k: r< k . Остальные (k − r ) переменных называются свободными - они могут принимать любые значения, из которых легко вычисляются разрешенные переменные.
Deci, în sistemele de mai sus, variabilele x 2, x 5, x 6 (pentru primul sistem) și x 2, x 5 (pentru al doilea) sunt libere. Cazul în care există variabile libere este mai bine formulat ca o teoremă:
Vă rugăm să rețineți: acesta este un punct foarte important! În funcție de modul în care scrieți sistemul rezultat, aceeași variabilă poate fi fie permisă, fie liberă. Majoritatea profesorilor superiori de matematică recomandă să scrieți variabilele în ordine lexicografică, de exemplu. indice ascendent. Cu toate acestea, nu aveți nicio obligație să urmați acest sfat.
Teorema. Dacă într-un sistem de n ecuații variabilele x 1, x 2, ..., x r sunt permise și x r + 1, x r + 2, ..., x k sunt libere, atunci:
- Dacă setăm valorile variabilelor libere (x r + 1 = t r + 1, x r + 2 = t r + 2, ..., x k = t k), apoi găsim valorile x 1, x 2, ..., x r, obținem una dintre decizii.
- Dacă în două soluții coincid valorile variabilelor libere, atunci coincid și valorile variabilelor permise, adică. solutiile sunt egale.
Care este sensul acestei teoreme? Pentru a obține toate soluțiile unui sistem de ecuații rezolvat, este suficient să izolați variabilele libere. Apoi, atribuirea variabilelor libere sensuri diferite, vom primi soluții gata făcute. Asta e tot - în acest fel poți obține toate soluțiile sistemului. Nu există alte soluții.
Concluzie: sistemul de ecuații rezolvat este întotdeauna consistent. Dacă numărul de ecuații dintr-un sistem rezolvat este egal cu numărul de variabile, sistemul va fi definit; dacă este mai mic, va fi nedefinit.
Și totul ar fi bine, dar se pune întrebarea: cum să obțineți unul rezolvat din sistemul original de ecuații? Pentru asta există
Definiție. Sistem m ecuații cu n necunoscute în vedere generala se scrie astfel:
Unde a ij sunt coeficienții și b i– permanentă.
Soluțiile sistemului sunt n numere care, atunci când sunt substituite în sistem, transformă fiecare dintre ecuațiile sale într-o identitate.
Definiție. Dacă un sistem are cel puțin o soluție, atunci se numește articulație. Dacă un sistem nu are o singură soluție, atunci se numește inconsecvent.
Definiție. Un sistem se numește determinat dacă are o singură soluție și nedefinit dacă are mai multe.
Definiție. Pentru un sistem de ecuații liniare matricea
A =  se numește matricea sistemului, iar matricea
se numește matricea sistemului, iar matricea
A * =  numită matrice extinsă a sistemului
numită matrice extinsă a sistemului
Definiție. Dacă b 1 , b 2 , …,b m = 0, atunci sistemul se numește omogen. Cometariu. Un sistem omogen este întotdeauna consistent, pentru că are întotdeauna o soluție zero.
Transformări elementare ale sistemelor.
1. Adunarea la ambele părți ale unei ecuații a părților corespunzătoare ale celeilalte, înmulțite cu același număr, diferit de zero.
2. Rearanjarea ecuațiilor.
3. Eliminarea din sistem a ecuațiilor care sunt identități pentru toți X.
formulele lui Cramer.
Această metodă este aplicabilă și numai în cazul sistemelor de ecuații liniare, unde numărul de variabile coincide cu numărul de ecuații.
Teorema. Sistem de n ecuații cu n necunoscute

dacă determinantul matricei sistemului nu este egal cu zero, atunci sistemul are o soluție unică și această soluție se găsește folosind formulele: x i = Unde D = det A, A D i este determinantul matricei obtinute din matricea sistemului prin inlocuirea coloanei i coloana de membri liberi b i.
D i = 
Exemplu. Găsiți soluția sistemului de ecuații: 
D = = 5(4 – 9) + (2 – 12) – (3 – 8) = -25 – 10 + 5 = -30;
D 1 = = (28 – 48) – (42 – 32) = -20 – 10 = -30.
D 2 = = 5(28 – 48) – (16 – 56) = -100 + 40 = -60.
D 3 = = 5(32 – 42) + (16 – 56) = -50 – 40 = -90.
Nota 1. Dacă sistemul este omogen, de ex. b i = 0, atunci pentru D¹0 sistemul are o soluție unică zero x 1 = x 2 = … = x n = 0.
Nota 2. La D=0 sistemul are un număr infinit de soluții.
Metoda matricei inverse.
Metoda matricei este aplicabilă rezolvării sistemelor de ecuații în care numărul de ecuații este egal cu numărul de necunoscute.
Să fie dat sistemul de ecuații: Să creăm matrice:
A=  - matricea coeficienților pentru variabile sau matricea sistemului;
- matricea coeficienților pentru variabile sau matricea sistemului;
B = - matrice – coloană de termeni liberi;
X = - matrice – coloană de necunoscute.
Atunci sistemul de ecuații se poate scrie: A×X = B. Să înmulțim ambele părți ale egalității din stânga cu A -1: A -1 ×A×X = A -1 ×B, deoarece A -1 ×A = E, Acea E×X = A -1 ×B, atunci următoarea formulă este valabilă:
X = A -1 ×B
Astfel, pentru a aplica aceasta metoda trebuie sa gasesti matrice inversă.
Exemplu. Rezolvați sistemul de ecuații:
X = , B = , A =
Să găsim matricea inversă A -1.
D = det A = 5(4-9) + 1(2 – 12) – 1(3 – 8) = -25 – 10 +5 = -30≠0 ⇒ matricea inversă există.
M11 =; M21 =; M31 =;
M12 = M22 = M32 =
M13 = M23 = M33 =

A -1 =  ;
;
Sa verificam:
A×A -1 =  =E.
=E.
Găsirea matricei X.
X = = A -1 B = × =  .
.
Am primit soluțiile de sistem: x =1; y = 2; z = 3.
4.Metoda Gauss.
Să fie dat sistemul m ecuații liniare cu n necunoscut:

Presupunând că coeficientul din sistem A 11 este diferit de zero (dacă nu este cazul, atunci ecuația cu un coeficient diferit de zero la X 1). Transformăm sistemul după cum urmează: lăsăm prima ecuație neschimbată și excludem necunoscutul din toate celelalte ecuații X 1 folosind transformări echivalente în modul descris mai sus.
În sistemul rezultat
 ,
,
presupunând că (ceea ce se poate obține întotdeauna prin rearanjarea ecuațiilor sau a termenilor în cadrul ecuațiilor), lăsăm neschimbate primele două ecuații ale sistemului, iar din ecuațiile rămase, folosind a doua ecuație, eliminăm necunoscutul cu ajutorul transformărilor elementare. X 2. În sistemul nou primit

cu condiția să lăsăm neschimbate primele trei ecuații, iar din toate celelalte, folosind a treia ecuație, eliminăm necunoscutul prin transformări elementare X 3 .
Acest proces continuă până când se realizează unul din trei cazuri posibile:
1) dacă ca rezultat ajungem la un sistem, a cărui ecuație are coeficienți zero pentru toate necunoscutele și un termen liber diferit de zero, atunci sistemul original este inconsecvent;
2) dacă în urma transformărilor obținem un sistem cu o matrice triunghiulară de coeficienți, atunci sistemul este consistent și definit;
3) dacă se obține un sistem treptat de coeficienți (și condiția de la punctul 1 nu este îndeplinită), atunci sistemul este consistent și nedefinit.
Luați în considerare sistemul pătratului :
 (1)
(1)
Acest sistem are un coeficient A 11 este diferit de zero. Dacă această condiție nu ar fi îndeplinită, atunci pentru a o obține ar fi necesară rearanjarea ecuațiilor, punând mai întâi ecuația al cărei coeficient la X 1 nu este egal cu zero.
Vom efectua următoarele transformări de sistem:
1) pentru că A 11 ¹0, lăsăm prima ecuație neschimbată;
2) în loc de a doua ecuație, scriem ecuația obținută dacă o scădem pe prima înmulțită cu 4 din a doua ecuație;
3) în loc de a treia ecuație, scriem diferența dintre a treia și prima, înmulțită cu 3;
4) în loc de a patra ecuație, scriem diferența dintre a patra și prima, înmulțită cu 5.
Noul sistem rezultat este echivalent cu cel original și are zero coeficienți în toate ecuațiile, cu excepția primei. X 1 (acesta a fost scopul transformărilor 1 – 4):  (2)
(2)
Pentru transformarea de mai sus și pentru toate transformările ulterioare, nu ar trebui să rescrieți complet întregul sistem, așa cum tocmai s-a făcut. Sistemul original poate fi reprezentat ca o matrice
 . (3)
. (3)
Matricea (3) se numește matrice extinsă pentru sistemul original de ecuații. Dacă eliminăm coloana de termeni liberi din matricea extinsă, obținem matricea coeficienților sistemului, care uneori este numit simplu matricea sistemului.
Sistemul (2) corespunde matricei extinse
 .
.
Să transformăm această matrice după cum urmează:
1) vom lăsa primele două linii neschimbate, de la elementul A 22 nu este zero;
2) în loc de a treia linie, scriem diferența dintre a doua linie și dublarea a treia;
3) înlocuiți a patra linie cu diferența dintre a doua linie dublată și a patra linie înmulțită cu 5.
Rezultatul este o matrice corespunzătoare unui sistem a cărui necunoscută X 1 este exclus din toate ecuațiile, cu excepția primei și a necunoscutului X 2 - din toate ecuațiile, cu excepția primei și a doua:
 .
.
Acum să excludem necunoscutul X 3 din a patra ecuație. Pentru a face acest lucru, transformăm ultima matrice după cum urmează:
1) vom lăsa primele trei rânduri neschimbate, din moment ce A 33¹0;
2) înlocuiți a patra linie cu diferența dintre a treia, înmulțită cu 39, și a patra:  .
.
Matricea rezultată corespunde sistemului
 . (4)
. (4)
Din ultima ecuație a acestui sistem obținem X 4 = 2. Înlocuind această valoare în a treia ecuație, obținem X 3 = 3. Acum din a doua ecuație rezultă că X 2 = 1, iar din primul - X 1 = –1. Este evident că soluția rezultată este unică (deoarece valoarea este determinată în singurul mod X 4 atunci X 3 etc.).
Definiție: Să numim o matrice pătrată care are numere diferite de zero pe diagonala principală și zerouri sub diagonala principală, matrice triunghiulară.
Matricea coeficienților sistemului (4) este o matrice triunghiulară.
Cometariu: Dacă, folosind transformări elementare, matricea coeficienților unui sistem pătrat poate fi redusă la o matrice triunghiulară, atunci sistemul este consistent și definit.
Să ne uităm la un alt exemplu:  . (5)
. (5)
Să efectuăm următoarele transformări ale matricei extinse a sistemului:
1) lăsați prima linie neschimbată;
2) în loc de a doua linie, scrieți diferența dintre a doua linie și dublați-l pe primul;
3) în loc de a treia linie, scriem diferența dintre a treia linie și triplă primul;
4) înlocuiți a patra linie cu diferența dintre a patra și prima;
5) înlocuiți a cincea linie cu diferența de a cincea linie și dublați prima.
Ca rezultat al transformărilor, obținem matricea
 .
.
Lăsând neschimbate primele două rânduri ale acestei matrice, o reducem la următoarea formă prin transformări elementare:
 .
.
Dacă acum, urmând metoda Gauss, care se mai numește și metoda eliminării secvențiale a necunoscutelor, folosind a treia linie aducem coeficienții la X 3 în rândurile al patrulea și al cincilea, apoi după împărțirea tuturor elementelor din al doilea rând la 5 și împărțirea tuturor elementelor din al treilea rând la 2, obținem matricea
 .
.
Fiecare dintre ultimele două rânduri ale acestei matrice corespunde ecuației 0 X 1 +0X 2 +0X 3 +0X 4 +0X 5 = 0. Această ecuație este satisfăcută de orice set de numere X 1 ,X 2, ¼, X 5 și ar trebui să fie eliminate din sistem. Astfel, sistemul cu matricea extinsă tocmai obținută este echivalent cu un sistem cu o matrice extinsă de forma
 . (6)
. (6)
Ultimul rând al acestei matrice corespunde ecuației
X 3 – 2X 4 + 3X 5 = –4. Dacă necunoscut X 4 și X 5 dau valori arbitrare: X 4 = C 1; X 5 = C 2, apoi din ultima ecuație a sistemului corespunzătoare matricei (6), obținem X 3 = –4 + 2C 1 – 3C 2. Înlocuirea expresiilor X 3 ,X 4, și X 5 în a doua ecuație a aceluiași sistem, obținem X 2 = –3 + 2C 1 – 2C 2. Acum din prima ecuație putem obține X 1 = 4 – C 1+ C 2. Soluția finală a sistemului este prezentată sub formă  .
.
Luați în considerare o matrice dreptunghiulară A, al cărui număr de coloane m mai mult decât numărul de linii n. O astfel de matrice A Hai sa sunăm călcat.
Este evident că matricea (6) este o matrice în etape.
Dacă, atunci când se aplică transformări echivalente unui sistem de ecuații, cel puțin o ecuație se reduce la forma
0X 1 + 0X 2 + ¼0 x n = B j (B j ¹ 0),
atunci sistemul este incompatibil sau contradictoriu, deoarece nici un singur set de numere X 1 , X 2, ¼, x n nu satisface aceasta ecuatie.
Dacă, la transformarea matricei extinse a sistemului, matricea coeficienților este redusă la o formă în trepte și sistemul nu se dovedește a fi inconsecvent, atunci sistemul este consistent și nedefinit, adică are infinit de solutii.
În acest din urmă sistem este posibil să se obțină toate soluțiile dând specific valori numerice parametrii C 1Și C 2.
Definiție: Acele variabile ai căror coeficienți sunt pe diagonala principală a matricei pasului (aceasta înseamnă că acești coeficienți sunt diferiți de zero) se numesc o principal. În exemplul discutat mai sus, acestea sunt necunoscutele X 1 , X 2 , X 3. Variabilele rămase sunt numite non-core.În exemplul de mai sus, acestea sunt variabilele X 4, și X 5 . Variabilelor non-primare li se pot da orice valoare sau pot fi exprimate prin parametri, așa cum sa făcut în ultimul exemplu.
Variabilele de bază sunt exprimate în mod unic prin variabile secundare.
Definiție: Dacă variabilelor non-principale li se dau valori numerice specifice și variabilele principale sunt exprimate prin ele, atunci soluția rezultată se numește soluție privată.
Definiție: Dacă variabilele nebazice sunt exprimate în termeni de parametri, atunci se obține o soluție, care se numește solutie generala.
Definiție: Dacă tuturor variabilelor minore li se dau valori zero, atunci soluția rezultată este numită de bază.
Cometariu: Același sistem poate fi uneori redus la seturi diferite de variabile de bază. Deci, de exemplu, puteți schimba coloanele a 3-a și a 4-a din matricea (6). Atunci variabilele principale vor fi X 1 , X 2 ,X 4 și cele non-principale - X 3 și X 5 .
Definiție: Dacă se obțin două seturi diferite de variabile de bază folosind metode diferite de găsire a unei soluții la același sistem, atunci aceste seturi conțin în mod necesar același număr de variabile, numite rangul sistemului.
Să luăm în considerare un alt sistem care are infinite de soluții:  .
.
Să transformăm matricea extinsă a sistemului folosind metoda Gaussiană:
 .
.
După cum puteți vedea, nu am obținut o matrice de etape, dar ultima matrice poate fi transformată schimbând coloanele a treia și a patra:  .
.
Această matrice este deja treptă. Sistemul corespunzător are două variabile non-bazice - X 3 , X 5 și trei principale - X 1 , X 2 , X 4 . Soluția la sistemul original este prezentată în următoarea formă:
Iată un exemplu de sistem care nu are soluție:
 .
.
Să transformăm matricea sistemului folosind metoda Gaussiană:
 .
.
Ultimul rând al ultimei matrice corespunde ecuației de nerezolvat 0x 1 + 0x 2 + 0x 3 = 1. În consecință, sistemul original este inconsecvent.
Prelegerea nr. 3.
Subiect: Vectori. Produsul scalar, vectorial și mixt al vectorilor
1. Conceptul de vector. Coliniaritatea, ortogonalitatea și coplanaritatea vectorilor.
2. Operare liniară pe vectori.
3. Produsul scalar al vectorilor și aplicarea acestuia
4. Produsul încrucișat al vectorilor și aplicarea acestuia
5. Munca mixta vectori și aplicarea acestuia
1. Conceptul de vector.Colinaritatea, ortogonalitatea și coplanaritatea vectorilor.
| |
Desemnare: , ,
Definiție: Lungimea sau modulul unui vector vector este un număr egal cu lungimea segmentului AB care reprezintă vectorul.
Definiție: Un vector se numește zero dacă începutul și sfârșitul vectorului coincid.
Definiție: Un vector de unitate de lungime se numește unitate. Definiție: Vectorii sunt numiți coliniari dacă se află pe aceeași linie sau pe linii paralele ( || ).
Cometariu:
1. Vectorii coliniari pot fi direcționați identic sau opus.
2. Vectorul zero este considerat coliniar cu orice vector.
Definiție: Se spune că doi vectori sunt egali dacă sunt coliniari,
au aceleași direcții și au aceleași lungimi ( = )
Sistemul este numit comun, sau rezolvabil, daca are cel putin o solutie. Sistemul este numit incompatibil, sau de nerezolvat, daca nu are solutii.
SLAU hotărât, nedefinit.
Dacă un SLAE are o soluție și una unică, atunci se numește anumit iar dacă soluția nu este unică, atunci incert.
ECUATII MATRICIALE
Matricele fac posibilă scrierea pe scurt a unui sistem de ecuații liniare. Să fie dat un sistem de 3 ecuații cu trei necunoscute:
Luați în considerare matricea sistemului  și coloane de matrice de termeni necunoscuți și liberi
și coloane de matrice de termeni necunoscuți și liberi 
Să găsim de lucru 
acestea. ca rezultat al produsului, obținem părțile din stânga ecuațiilor acestui sistem. Apoi, folosind definiția egalității matriceale, acest sistem poate fi scris sub forma
 sau mai scurt A∙X=B.
sau mai scurt A∙X=B.
Iată matricele AȘi B sunt cunoscute, iar matricea X necunoscut. Este necesar să-l găsim, pentru că... elementele sale sunt soluția acestui sistem. Această ecuație se numește ecuația matriceală.
Fie determinantul matricei diferit de zero | A| ≠ 0. Atunci ecuația matriceală se rezolvă după cum urmează. Înmulțiți ambele părți ale ecuației din stânga cu matricea A-1, inversul matricei A: . Deoarece A -1 A = EȘi E∙X = X, apoi obținem o soluție a ecuației matriceale sub forma X = A -1 B .
Rețineți că, deoarece matricea inversă poate fi găsită numai pentru matrice pătrată, metoda matricei poate rezolva numai acele sisteme în care numărul de ecuații coincide cu numărul de necunoscute.
formulele lui Cramer
Metoda lui Cramer constă în găsirea secvenţială determinant principal al sistemului, adică determinant al matricei A: D = det (a i j) şi n determinanţi auxiliari Di (i= ), care se obțin din determinantul D prin înlocuirea coloanei i-a cu o coloană de termeni liberi.
Formulele lui Cramer arată astfel: D × x i = D i (i = ).
De aici rezultă regula lui Cramer, care dă un răspuns exhaustiv la întrebarea privind compatibilitatea sistemului: dacă principalul determinant al sistemului este diferit de zero, atunci sistemul are o soluție unică, determinată de formulele: x i = D i / D.
Dacă determinantul principal al sistemului D și toți determinanții auxiliari D i = 0 (i= ), atunci sistemul are un număr infinit de soluții. Dacă determinantul principal al sistemului D = 0 și cel puțin un determinant auxiliar este diferit de zero, atunci sistemul este inconsecvent.
Teorema (regula lui Cramer): Dacă determinantul sistemului Δ ≠ 0, atunci sistemul luat în considerare are una și o singură soluție și 
Dovada: Deci, luați în considerare un sistem de 3 ecuații cu trei necunoscute. Să înmulțim prima ecuație a sistemului cu complementul algebric A 11 element un 11, a 2-a ecuație – pe A 21 iar al treilea – pe A 31:

Să adăugăm aceste ecuații:
Să ne uităm la fiecare dintre paranteze și partea dreaptă a acestei ecuații. Prin teorema expansiunii determinantului în elemente ale coloanei I.
În mod similar, se poate demonstra că și .
În cele din urmă, este ușor de observat asta 
Astfel, obținem egalitatea: . Prin urmare, .
Egalitățile și sunt derivate similar, din care urmează enunțul teoremei.
Teorema Kronecker-Capelli.
Un sistem de ecuații liniare este consistent dacă și numai dacă rangul matricei sistemului este egal cu rangul matricei extinse.
Dovada: Se împarte în două etape.
1. Lăsați sistemul să aibă o soluție. Să arătăm asta.
Lasă un set de numere ![]() este o soluție pentru sistem. Să notăm prin coloana a treia a matricei,
este o soluție pentru sistem. Să notăm prin coloana a treia a matricei, ![]() . Apoi, adică coloana de termeni inactivi este o combinație liniară a coloanelor matricei. Lăsa . Să ne prefacem că
. Apoi, adică coloana de termeni inactivi este o combinație liniară a coloanelor matricei. Lăsa . Să ne prefacem că ![]() . Apoi prin
. Apoi prin ![]() . Să alegem în minoră de bază. Are ordine. Coloana de termeni liberi trebuie să treacă prin acest minor, altfel va fi baza minoră a matricei. Coloana de termeni inactivi în minor este o combinație liniară a coloanelor matricei. Datorită proprietăților determinantului, unde este determinantul care se obține de la minor prin înlocuirea coloanei de termeni liberi cu coloana . Dacă coloana a trecut prin M minor, atunci în , vor exista două coloane identice și, prin urmare, . Dacă coloana nu a trecut prin minor, atunci ea va diferi de minorul de ordinul r+1 al matricei doar în ordinea coloanelor. De atunci. Astfel, ceea ce contrazice definiția de bază minoră. Aceasta înseamnă că ipoteza că , este incorectă.
. Să alegem în minoră de bază. Are ordine. Coloana de termeni liberi trebuie să treacă prin acest minor, altfel va fi baza minoră a matricei. Coloana de termeni inactivi în minor este o combinație liniară a coloanelor matricei. Datorită proprietăților determinantului, unde este determinantul care se obține de la minor prin înlocuirea coloanei de termeni liberi cu coloana . Dacă coloana a trecut prin M minor, atunci în , vor exista două coloane identice și, prin urmare, . Dacă coloana nu a trecut prin minor, atunci ea va diferi de minorul de ordinul r+1 al matricei doar în ordinea coloanelor. De atunci. Astfel, ceea ce contrazice definiția de bază minoră. Aceasta înseamnă că ipoteza că , este incorectă.
2. Fie . Să arătăm că sistemul are o soluție. Deoarece , atunci baza minoră a matricei este baza minoră a matricei. Lasă coloanele să treacă prin minor ![]() . Apoi, după teorema pe baza minorului într-o matrice, coloana de termeni liberi este o combinație liniară a coloanelor indicate:
. Apoi, după teorema pe baza minorului într-o matrice, coloana de termeni liberi este o combinație liniară a coloanelor indicate:
| (1) |
Să punem , , , , și să luăm necunoscutele rămase egale cu zero. Apoi, cu aceste valori obținem
În virtutea egalității (1) . Ultima egalitate înseamnă că mulțimea de numere ![]() este o soluție pentru sistem. S-a dovedit existența unei soluții.
este o soluție pentru sistem. S-a dovedit existența unei soluții.
În sistemul discutat mai sus ![]() , iar sistemul este cooperant. În sistem , , iar sistemul este inconsecvent.
, iar sistemul este cooperant. În sistem , , iar sistemul este inconsecvent.
Notă: Deși teorema Kronecker-Capelli face posibilă determinarea dacă un sistem este consistent, este folosită destul de rar, în principal în cercetare teoretică. Motivul este că calculele efectuate pentru a găsi rangul unei matrice sunt practic aceleași cu calculele efectuate pentru a găsi soluția sistemului. Prin urmare, de obicei, în loc să găsească și , ei caută o soluție pentru sistem. Dacă îl putem găsi, aflăm că sistemul este consistent și, în același timp, obținem soluția acestuia. Dacă nu poate fi găsită o soluție, atunci tragem concluzia că sistemul este inconsecvent.
Algoritm pentru găsirea de soluții la un sistem arbitrar de ecuații liniare (metoda Gauss)
Să fie dat un sistem de ecuații liniare cu necunoscute. Se cere să-și găsească soluția generală, dacă este compatibilă, sau să-i stabilească incompatibilitatea. Metoda care va fi prezentată în această secțiune este apropiată de metoda de calcul a determinantului și de metoda de găsire a rangului unei matrice. Algoritmul propus este numit metoda gaussiana sau prin metoda excluderii secvenţiale a necunoscutelor.
Să notăm matricea extinsă a sistemului

Să le numim operații elementare următoarele acțiuni cu matrici:
1. rearanjarea liniilor;
2. înmulțirea unui șir cu un alt număr decât zero;
3. adăugarea unui șir la un alt șir înmulțit cu un număr.
Rețineți că atunci când rezolvați un sistem de ecuații, spre deosebire de calcularea determinantului și găsirea rangului, nu puteți opera cu coloane. Dacă se reface un sistem de ecuații din matricea obținută prin efectuarea unei operații elementare, atunci noul sistem va fi echivalent cu cel inițial.
Scopul algoritmului este de a, prin aplicarea unei secvențe de operații elementare matricei, să se asigure că fiecare rând, cu excepția poate primul, începe cu zerouri, iar numărul de zerouri înainte de primul element diferit de zero din fiecare rând următor este mai mare decât în cea precedentă.
Pasul algoritmului este următorul. Găsiți prima coloană diferită de zero din matrice. Fie aceasta o coloană cu număr . Găsim un element diferit de zero în el și schimbăm linia cu acest element cu prima linie. Pentru a nu adăuga notații suplimentare, vom presupune că o astfel de schimbare a rândurilor din matrice a fost deja făcută, adică. Apoi la a doua linie adăugăm primul, înmulțit cu număr, la a treia linie îl adunăm pe primul, înmulțit cu număr etc. Ca rezultat, obținem matricea

(Coloanele zero de la început lipsesc de obicei.)
Dacă matricea conține un rând cu numărul k, în care toate elementele sunt egale cu zero și , atunci oprim execuția algoritmului și concluzionăm că sistemul este inconsecvent. Într-adevăr, restabilind sistemul de ecuații din matricea extinsă, obținem că a-a ecuație va avea forma ![]()
Niciun set de numere nu satisface această ecuație. ![]() .
.
Matricea poate fi scrisă sub forma 

În raport cu matricea, efectuăm pasul descris al algoritmului. Obținem matricea

Unde , . Această matrice poate fi din nou scrisă ca

și din nou aplicați pasul algoritm descris mai sus la matrice.
Procesul se oprește dacă, după efectuarea pasului următor, noua matrice redusă constă numai din zerouri sau dacă toate rândurile sunt epuizate. Rețineți că concluzia că sistemul este incompatibil ar fi putut opri procesul mai devreme.
Dacă nu am fi redus matricea, am fi ajuns la o matrice de forma

În continuare, așa-numitul cursa inversă metoda Gauss. Folosind matricea, compunem un sistem de ecuații. În partea stângă lăsăm necunoscute cu numere corespunzătoare primelor elemente nenule din fiecare linie, adică. Observa asta . Mutăm necunoscutele rămase în partea dreaptă. Considerând că necunoscutele din partea dreaptă sunt anumite cantități fixe, este ușor de exprimat prin ele necunoscutele din partea stângă.
Acum, atribuind valori arbitrare necunoscutelor din partea dreaptă și calculând valorile variabilelor din partea stângă, vom găsi diverse soluții la sistemul original Ax=b. Pentru a nota soluția generală, trebuie să indicați necunoscutele din partea dreaptă într-o anumită ordine prin litere ![]() , inclusiv acele necunoscute care nu sunt scrise în mod explicit în partea dreaptă din cauza coeficienților zero, iar apoi coloana de necunoscute poate fi scrisă ca o coloană, unde fiecare element este o combinație liniară de cantități arbitrare
, inclusiv acele necunoscute care nu sunt scrise în mod explicit în partea dreaptă din cauza coeficienților zero, iar apoi coloana de necunoscute poate fi scrisă ca o coloană, unde fiecare element este o combinație liniară de cantități arbitrare ![]() (în special, doar o valoare arbitrară). Această intrare va fi soluția generală a sistemului.
(în special, doar o valoare arbitrară). Această intrare va fi soluția generală a sistemului.
Dacă sistemul era omogen, atunci obținem soluția generală a sistemului omogen. Coeficienții pentru , luați în fiecare element al coloanei soluții generale, vor forma prima soluție din sistemul fundamental de soluții, coeficienții pentru - a doua soluție etc.
Metoda 2: Sistemul fundamental de soluții al unui sistem omogen poate fi obținut în alt mod. Pentru a face acest lucru, unei variabile mutate în partea dreaptă trebuie să i se atribuie valoarea 1, iar restul - zerouri. După ce am calculat valorile variabilelor din partea stângă, obținem o soluție din sistemul fundamental. Atribuind valoarea 1 unei alte variabile din partea dreaptă și zerouri restului, obținem a doua soluție din sistemul fundamental etc.
Definiție: sistemul se numește în comun th dacă are cel puțin o soluție, și inconsecventă - în caz contrar, adică în cazul în care sistemul nu are soluții. Întrebarea dacă un sistem are sau nu o soluție este legată nu numai de raportul dintre numărul de ecuații și numărul de necunoscute. De exemplu, un sistem de trei ecuații cu două necunoscute
 |
are o soluție și chiar are infinit de soluții, dar un sistem de două ecuații cu trei necunoscute.
……. … ……
A m 1 x 1 + … + a mn x n = 0
Acest sistem este întotdeauna consistent deoarece are o soluție trivială x 1 =...=x n =0
Pentru existența unor soluții netriviale este necesar și suficient de satisfăcut
conditii r = r(A)< n , что равносильно условию det(A)=0, когда матрица А – квадратная.
Th Mulțimea soluțiilor SLAE formează un spațiu liniar de dimensiune (n-r). Aceasta înseamnă că produsul soluției sale cu un număr, precum și suma și combinația liniară a unui număr finit al soluțiilor sale, sunt soluții pentru acest sistem. Spațiul de soluție liniară al oricărui SLAE este un subspațiu al spațiului Rn.
Orice set de (n-r) soluții liniar independente ale unui SLAE (care este o bază în spațiul soluțiilor) se numește set fundamental de soluții (FSR).
Fie x 1 ,…, x r necunoscutele de bază, x r +1 ,…, x n – necunoscute libere. Să dăm variabilelor libere următoarele valori pe rând:
……. … ……
A m 1 x 1 + … + a mn x n = 0
Formează un spațiu liniar S (spațiu soluție), care este un subspațiu în R n (n este numărul de necunoscute), și dims=k=n-r, unde r este rangul sistemului. Baza din spațiul soluțiilor (x (1) ,…, x (k)) se numește sistemul de soluții fundamentale și soluţia generală are forma:
X=c 1 x (1) + … + c k x (k) , c (1) ,…, c (k) ? R
Un sistem de m ecuații liniare cu n necunoscute numit un sistem al formei
Unde a ijȘi b i (i=1,…,m; b=1,…,n) sunt câteva numere cunoscute și x 1 ,…,x n– necunoscut. În desemnarea coeficienţilor a ij primul indice i denotă numărul ecuației, iar al doilea j– numărul necunoscutului la care se află acest coeficient.
Vom scrie coeficienții pentru necunoscute sub forma unei matrice  , pe care o vom numi matricea sistemului.
, pe care o vom numi matricea sistemului.
Numerele din partea dreaptă a ecuațiilor sunt b 1 ,…,b m sunt numite membri liberi.
Totalitate n numere c 1 ,…,c n numit decizie a unui sistem dat, dacă fiecare ecuație a sistemului devine o egalitate după înlocuirea numerelor în ea c 1 ,…,c nîn locul necunoscutelor corespunzătoare x 1 ,…,x n.
Sarcina noastră va fi să găsim soluții pentru sistem. În acest caz, pot apărea trei situații:
Un sistem de ecuații liniare care are cel puțin o soluție se numește comun. Altfel, i.e. dacă sistemul nu are soluții, atunci este numit nearticulată.
Să luăm în considerare modalități de a găsi soluții pentru sistem.
METODĂ MATRIXĂ PENTRU REZOLVAREA SISTEMELOR DE ECUAȚII LINARE
Matricele fac posibilă scrierea pe scurt a unui sistem de ecuații liniare. Să fie dat un sistem de 3 ecuații cu trei necunoscute:
Luați în considerare matricea sistemului  și coloane de matrice de termeni necunoscuți și liberi
și coloane de matrice de termeni necunoscuți și liberi 
Să găsim de lucru
acestea. ca rezultat al produsului, obținem părțile din stânga ecuațiilor acestui sistem. Apoi, folosind definiția egalității matriceale, acest sistem poate fi scris sub forma
 sau mai scurt A∙X=B.
sau mai scurt A∙X=B.
Iată matricele AȘi B sunt cunoscute, iar matricea X necunoscut. Este necesar să-l găsim, pentru că... elementele sale sunt soluția acestui sistem. Această ecuație se numește ecuația matriceală.
Fie determinantul matricei diferit de zero | A| ≠ 0. Atunci ecuația matriceală se rezolvă după cum urmează. Înmulțiți ambele părți ale ecuației din stânga cu matricea A-1, inversul matricei A: . Deoarece A -1 A = EȘi E∙X = X, apoi obținem o soluție a ecuației matriceale sub forma X = A -1 B .
Rețineți că, deoarece matricea inversă poate fi găsită numai pentru matrice pătrată, metoda matricei poate rezolva numai acele sisteme în care numărul de ecuații coincide cu numărul de necunoscute. Cu toate acestea, înregistrarea matriceală a sistemului este posibilă și în cazul în care numărul de ecuații nu este egal cu numărul de necunoscute, atunci matricea A nu va fi pătrat și, prin urmare, este imposibil să găsiți o soluție la sistem în formă X = A -1 B.
Exemple. Rezolvarea sistemelor de ecuații.
REGULA LUI CRAMER
Să considerăm un sistem de 3 ecuații liniare cu trei necunoscute:
Determinant de ordinul al treilea corespunzător matricei sistemului, i.e. compus din coeficienți pentru necunoscute,

numit determinant al sistemului.
Să mai compunem trei determinanți astfel: înlocuiți secvențial 1, 2 și 3 coloane din determinantul D cu o coloană de termeni liberi

Apoi putem demonstra următorul rezultat.
Teoremă (regula lui Cramer). Dacă determinantul sistemului Δ ≠ 0, atunci sistemul luat în considerare are una și o singură soluție și
![]()
Dovada. Deci, să considerăm un sistem de 3 ecuații cu trei necunoscute. Să înmulțim prima ecuație a sistemului cu complementul algebric A 11 element un 11, a 2-a ecuație – pe A 21 iar al treilea – pe A 31:

Să adăugăm aceste ecuații:
Să ne uităm la fiecare dintre paranteze și partea dreaptă a acestei ecuații. Prin teorema expansiunii determinantului în elementele coloanei I
În mod similar, se poate demonstra că și .
În cele din urmă, este ușor de observat asta 
Astfel, obținem egalitatea: .
Prin urmare, .
Egalitățile și sunt derivate similar, din care urmează enunțul teoremei.
Astfel, observăm că dacă determinantul sistemului Δ ≠ 0, atunci sistemul are o soluție unică și invers. Dacă determinantul sistemului este egal cu zero, atunci sistemul fie are un număr infinit de soluții, fie nu are soluții, adică. incompatibil.
Exemple. Rezolvarea sistemului de ecuații

METODA GAUSS
Metodele discutate anterior pot fi folosite pentru a rezolva numai acele sisteme în care numărul de ecuații coincide cu numărul de necunoscute, iar determinantul sistemului trebuie să fie diferit de zero. Metoda Gauss este mai universală și potrivită pentru sisteme cu orice număr de ecuații. Constă în eliminarea consecventă a necunoscutelor din ecuațiile sistemului.
Luați în considerare din nou sistemul de la trei ecuații cu trei necunoscute:
 .
.
Vom lăsa prima ecuație neschimbată, iar din a 2-a și a 3-a vom exclude termenii care conțin x 1. Pentru a face acest lucru, împărțiți a doua ecuație la A 21 și înmulțiți cu - A 11, apoi adăugați-l la prima ecuație. În mod similar, împărțim a treia ecuație la A 31 și înmulțiți cu - A 11, apoi adăugați-l cu primul. Ca rezultat, sistemul original va lua forma:
Acum din ultima ecuație eliminăm termenul care conține x 2. Pentru a face acest lucru, împărțiți a treia ecuație cu, înmulțiți cu și adăugați cu a doua. Atunci vom avea un sistem de ecuații:
De aici, din ultima ecuație este ușor de găsit x 3, apoi din a 2-a ecuație x 2și în sfârșit, de la 1 - x 1.
Când se utilizează metoda Gauss, ecuațiile pot fi schimbate dacă este necesar.
Adesea în loc să scrie sistem nou ecuațiile, sunt limitate la scrierea matricei extinse a sistemului:

iar apoi aduceți-o într-o formă triunghiulară sau diagonală folosind transformări elementare.
LA transformări elementare matricele includ următoarele transformări:
- rearanjarea rândurilor sau coloanelor;
- înmulțirea unui șir cu un alt număr decât zero;
- adăugarea altor linii la o singură linie.
Exemple: Rezolvarea sistemelor de ecuații folosind metoda Gauss.

Astfel, sistemul are un număr infinit de soluții.
- Sisteme m ecuații liniare cu n necunoscut.
Rezolvarea unui sistem de ecuații liniare- acesta este un astfel de set de numere ( x 1 , x 2 , …, x n), atunci când sunt substituite în fiecare dintre ecuațiile sistemului, se obține egalitatea corectă.
Unde a ij , i = 1, …, m; j = 1, …, n— coeficienții sistemului;
b i , i = 1, …, m- membri gratuiti;
x j , j = 1, …, n- necunoscut.
Sistemul de mai sus poate fi scris sub formă de matrice: A X = B,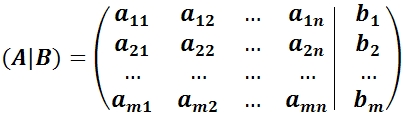

Unde ( A|B) este matricea principală a sistemului;
A— matrice de sistem extinsă;
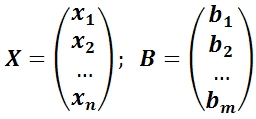
X— coloana de necunoscute;
B— coloana de membri liberi.
Dacă matricea B nu este o matrice nulă ∅, atunci acest sistem de ecuații liniare se numește neomogen.
Dacă matricea B= ∅, atunci acest sistem de ecuații liniare se numește omogen. Un sistem omogen are întotdeauna o soluție zero (trivială): x 1 = x 2 = …, x n = 0.
Sistem comun de ecuații liniare este un sistem de ecuații liniare care are o soluție.
Sistem inconsecvent de ecuații liniare este un sistem nerezolvabil de ecuații liniare.
Un anumit sistem de ecuații liniare este un sistem de ecuații liniare care are o soluție unică.
Sistem nedefinit de ecuații liniare este un sistem de ecuații liniare cu un număr infinit de soluții. - Sisteme de n ecuații liniare cu n necunoscute
Dacă numărul de necunoscute este egal cu numărul de ecuații, atunci matricea este pătrată. Determinantul unei matrice este numit principalul determinant al unui sistem de ecuații liniare și este notat cu simbolul Δ.
Metoda Cramer pentru rezolvarea sistemelor n ecuații liniare cu n necunoscut.
regula lui Cramer.
Dacă determinantul principal al unui sistem de ecuații liniare nu este egal cu zero, atunci sistemul este consistent și definit, iar singura soluție este calculată folosind formulele Cramer:
unde Δ i sunt determinanţi obţinuţi din determinantul principal al sistemului Δ prin înlocuire i a coloana la coloana membrilor liberi. . - Sisteme de m ecuații liniare cu n necunoscute
Teorema Kronecker–Capelli.
Pentru ca un anumit sistem de ecuații liniare să fie consistent, este necesar și suficient ca rangul matricei sistemului să fie egal cu rangul matricei extinse a sistemului, song(Α) = song(Α|B).
Dacă song(Α) ≠ song(Α|B), atunci sistemul evident nu are soluții.
Dacă song(Α) = song(Α|B), atunci sunt posibile două cazuri:
1) rang(Α) = n(număr de necunoscute) - soluția este unică și poate fi obținută folosind formulele lui Cramer;
2) rang (Α)< n - există infinit de multe soluții. - metoda Gauss pentru rezolvarea sistemelor de ecuații liniare
Să creăm o matrice extinsă ( A|B) a unui sistem dat din coeficienții necunoscutelor și părților din dreapta.
Metoda Gaussiană sau metoda eliminării necunoscutelor constă în reducerea matricei extinse ( A|B) folosind transformări elementare peste rândurile sale la o formă diagonală (la forma triunghiulară superioară). Revenind la sistemul de ecuații, toate necunoscutele sunt determinate.
Transformările elementare peste șiruri includ următoarele:
1) schimbați două linii;
2) înmulțirea unui șir cu un alt număr decât 0;
3) adăugarea unui alt șir la un șir, înmulțit cu un număr arbitrar;
4) aruncarea unei linii zero.
O matrice extinsă redusă la formă diagonală corespunde unui sistem liniar echivalent cu cel dat, a cărui soluție nu provoacă dificultăți. . - Sistem de ecuații liniare omogene.
Un sistem omogen are forma:
corespunde ecuației matriceale A X = 0.
1) Un sistem omogen este întotdeauna consistent, deoarece r(A) = r(A|B), există întotdeauna o soluție zero (0, 0, …, 0).
2) Pentru ca un sistem omogen să aibă o soluție diferită de zero este necesar și suficient ca r = r(A)< n , care este echivalent cu Δ = 0.
3) Dacă r< n , atunci evident Δ = 0, atunci apar necunoscute libere c 1 , c 2 , …, c n-r, sistemul are soluții non-triviale și există o infinitate de ele.
4) Decizie comună X la r< n poate fi scris sub formă de matrice după cum urmează:
X = c 1 X 1 + c 2 X 2 + … + c n-r X n-r,
unde sunt solutiile X 1, X 2, …, X n-r formează un sistem fundamental de soluții.
5) Sistemul fundamental de soluții poate fi obținut din soluția generală a unui sistem omogen: ,
,
dacă setăm succesiv valorile parametrilor egale cu (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Extinderea soluției generale în ceea ce privește sistemul fundamental de soluții este o înregistrare a unei soluții generale sub forma unei combinații liniare de soluții aparținând sistemului fundamental.
Teorema. Pentru ca un sistem de ecuații liniare omogene să aibă o soluție diferită de zero, este necesar și suficient ca Δ ≠ 0.
Deci, dacă determinantul Δ ≠ 0, atunci sistemul are o soluție unică.
Dacă Δ ≠ 0, atunci sistemul de ecuații liniare omogene are un număr infinit de soluții.
Teorema. Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r(A)< n .
Dovada:
1) r nu poate fi mai mult n(rangul matricei nu depășește numărul de coloane sau rânduri);
2) r< n , deoarece Dacă r = n, atunci determinantul principal al sistemului Δ ≠ 0 și, conform formulelor lui Cramer, există o soluție trivială unică x 1 = x 2 = … = x n = 0, ceea ce contrazice condiția. Mijloace, r(A)< n .
Consecinţă. Pentru un sistem omogen n ecuații liniare cu n necunoscutele au avut o soluție diferită de zero, este necesar și suficient ca Δ = 0.